forked from MDL29/JacoBot
|
|
||
|---|---|---|
| .. | ||
| arduino | ||
| parts | ||
| README.md | ||
README.md
JacoBot
Jacobot is a robot that moves on a carpet and is controlled wirelessly by the jacopad.
Bot
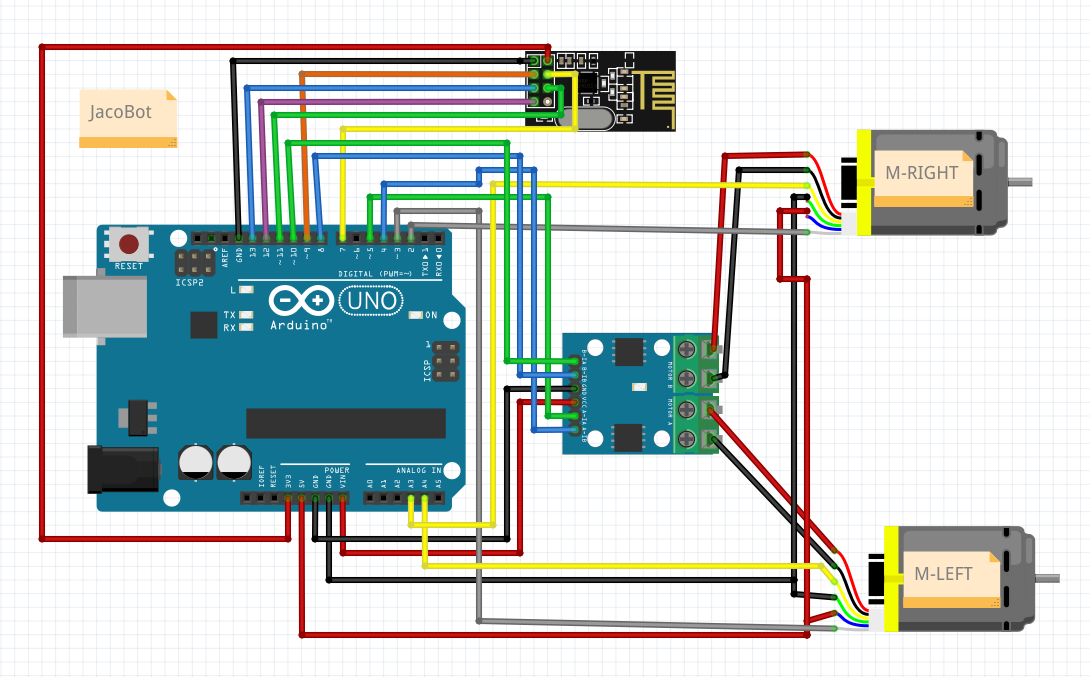
Shematic
/jacobot/arduino/shematics/shematic.png
How it works
Jacobot moves precisely and adapts to the terrain thanks to encoder motors.
Design
All parts of the JacoPad's tokens tokens are in /jacobot/parts/tokens/ and /jacobot/arduino/models/
Wireless protocol
The Jacobot and the Jacopad talk via NRF24L01 following this protocol:
- Use canal 120
- 24-character message
Exemple :
"JACOFFRLfLfNNNFFLRLN07"
\__/\________/\____/\/
1 2 3 4
- 1: The first part will always be "JACO",
to differentiate it from other projects using the same canal.
- 2: The second part is the 10 tokens placed on the normal slots.
"F" : Forward
"L" : Left
"R" : Right
"f" : Function
"N" : Nothing
- 3: The third part is the same that the second but for the
function slots and with only 6 tokens.
- 4: The fourth part is the checksum of the 3 others.